Research
I was, in some capacity, involved in all the research that occured at the UGA Small Satellite Research Laboratory from 2015 - 2020.
The research listed below is research that was either/or an Author, Coauthor, or Significant Contributor:
KEY:
[T] = Thesis
[r] = research paper/abstract
[p] = poster
[s] = slideshow/keynote
[$] = funding!
-
-- 2023 --
-
[s] 3rd SMD and ETD Workshop on AI and Data Science, Greenbelt MD
An Overview of Distributed Spacecraft Autonomy
Caleb Adams, Jeremy Frank
-
[s] JPL Center for Autonomy, Pasadena CA
An Overview of Distributed Spacecraft Autonomy
Caleb Adams, Jeremy Frank
-
[r] The IEEE Aerospace Conference, Big Sky MT
Development of a High-Performance, Heterogenous, Scalable Test-Bed for Distributed Spacecraft
DSA is building a heterogenous, many-node, Processor-in-the- Loop (PiL) testbed to aid the development and verification of scalable distributed autonomy capabilities for multi-spacecraft missions, including LPNT, heliophysics, space situational aware- ness, and collision avoidance.
Caleb Adams, Brian Kempa, Walter Vaughan, Nicholas Cramer
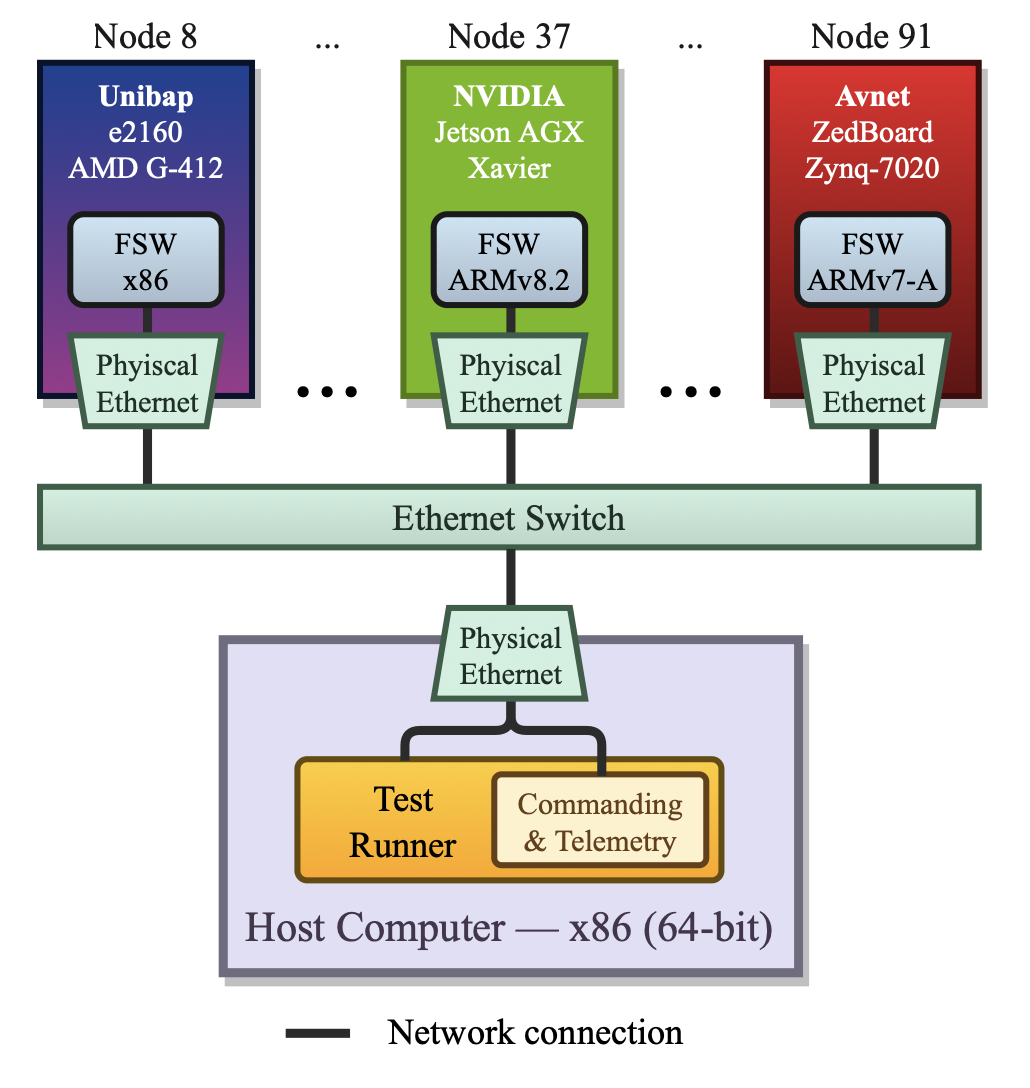
A simplified diagram of the 100 PiL DSA testbed
Bibtex Citation@inproceedings{AdamsTestbed2023,
year={2023},
month=mar,
publisher={IEEE},
author={Caleb Adams, Brian Kempa, Walter Vaughan, Nicholas Cramer},
title={Development of a High-Performance, Heterogenous, Scalable Test-Bed for Distributed Spacecraft},
booktitle={2023 IEEE Aerospace Conference}
} -
[s] Fligt Software Workshop, Pasadena CA
Rapid Spacecraft Payload Development: In-Orbit Demonstration of Flight Software Reuse, Scalability, and Dependability
Walter Vaughan, Caleb Adams, Sergei Gridnev, Nick Cramer, Alice Anlind, Eric Brune, Oskar Flordal, Fredrik Bruhn, Alan George
-
[s] 3rd SMD and ETD Workshop on AI and Data Science, Greenbelt MD
-
-- 2022 --
I went backpacking
-
-- 2021 --
-
[r] The AIAA/Utah State Small Satellite Conference - SmallSat, Logan UT
Design and testing of autonomous distributed space systems
In this paper, we present Distributed Spacecraft Autonomy (DSA) project, a payload on NASA’s Starling spacecraft experiment.
Nicholas Cramer, Daniel Cellucci, Caleb Adams, Adam Sweet, Mohammad Hejase, Jeremy Frank, Richard Levinson, Sergei Gridnev, Lara Brown
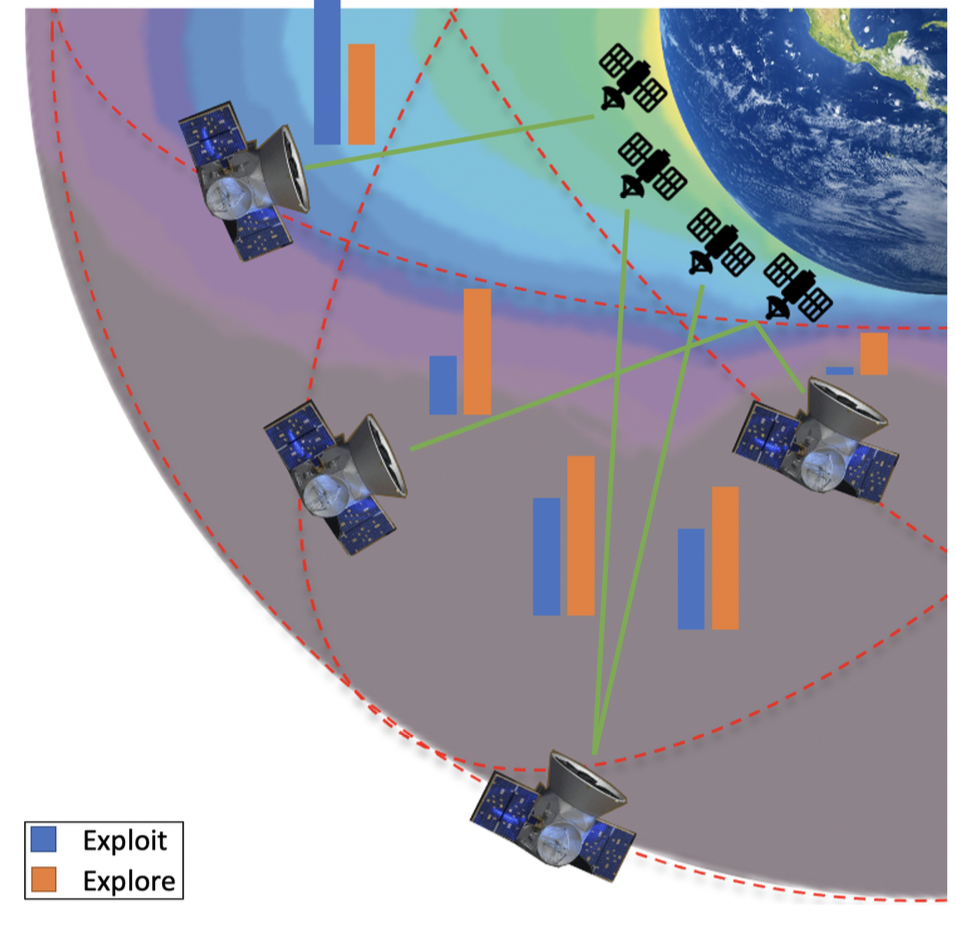
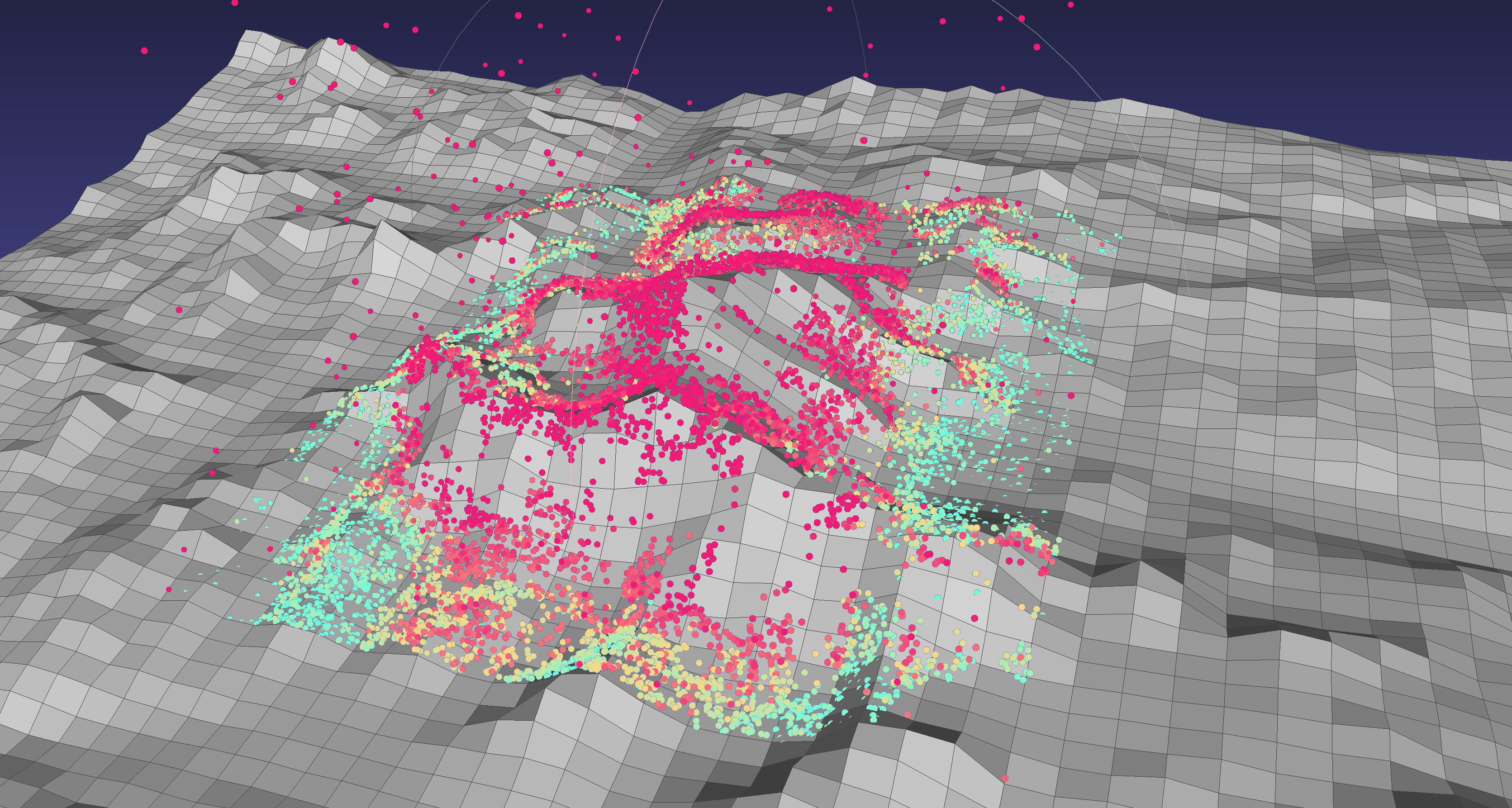
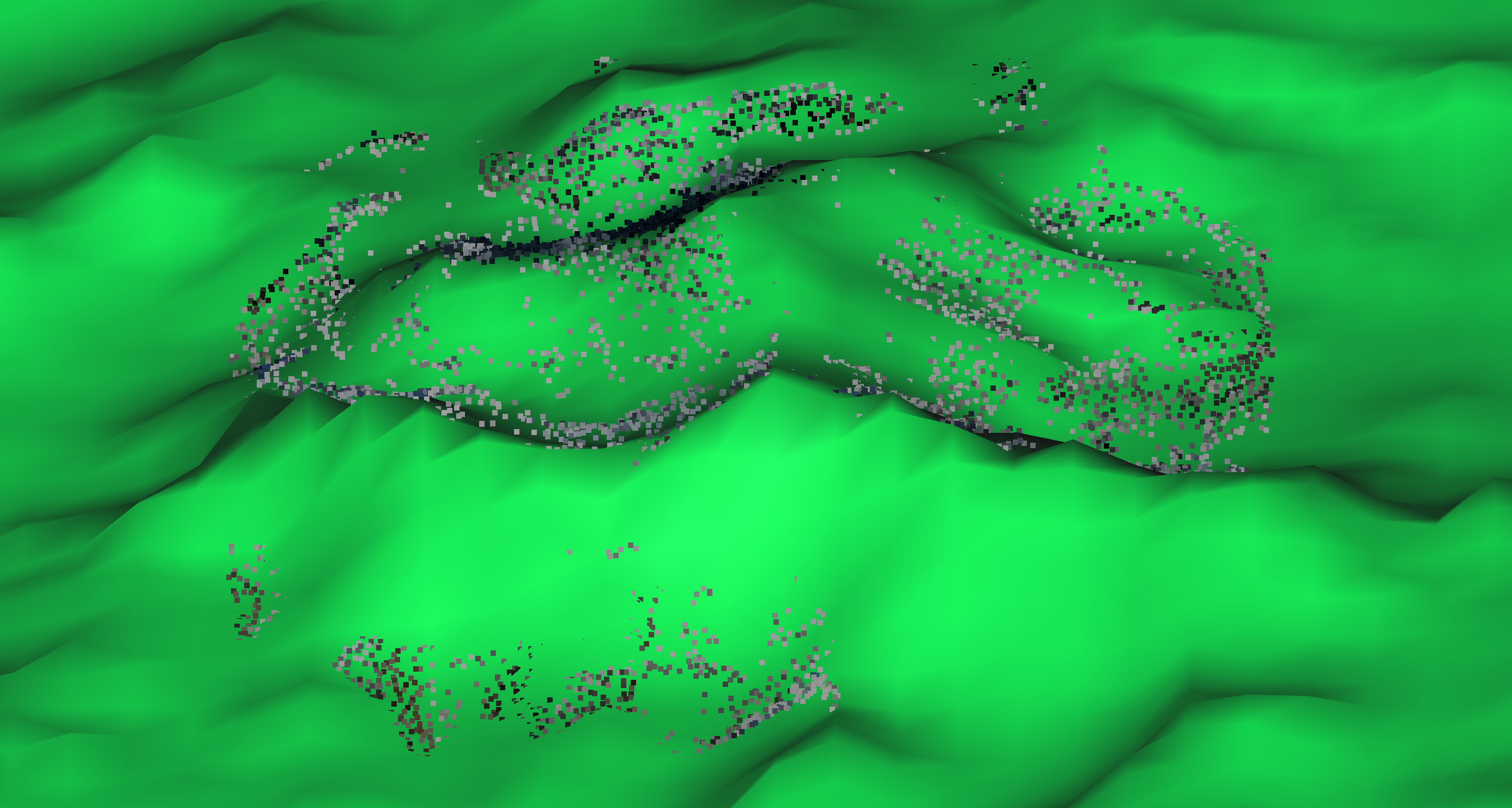
Notional example of the technology demonstration where the green lines are the selected GPS channels and the bar charts are the resulting exploit and explore rewards that get fed into the planner. Background image based on results presented Bibtex Citation@inproceedings{Cramer2021,
title={Design and testing of autonomous distributed space systems},
author={Nicholas Cramer, Daniel Cellucci, Caleb Adams, Adam Sweet, Mohammad Hejase, Jeremy Frank, Richard Levinson, Sergei Gridnev, Lara Brown},
url={https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=5003&context=smallsat},
journal={35th Annual AIAA/USU Conference on Small Satellites},
year={2021},
publisher={AIAA}
} -
[r] The IEEE Aerospace Conference (Best Paper in Track 5 - Sensing and Observation Systems), Big Sky MT
A Hardware Accelerated Computer Vision Library for 3D Reconstruction Onboard Small Satellites
This paper discusses the computer vision system of the MOCI (Multiview Onboard Computational Imager) Satellite.
Caleb Adams, Jackson Parker, Dr. David Cotten
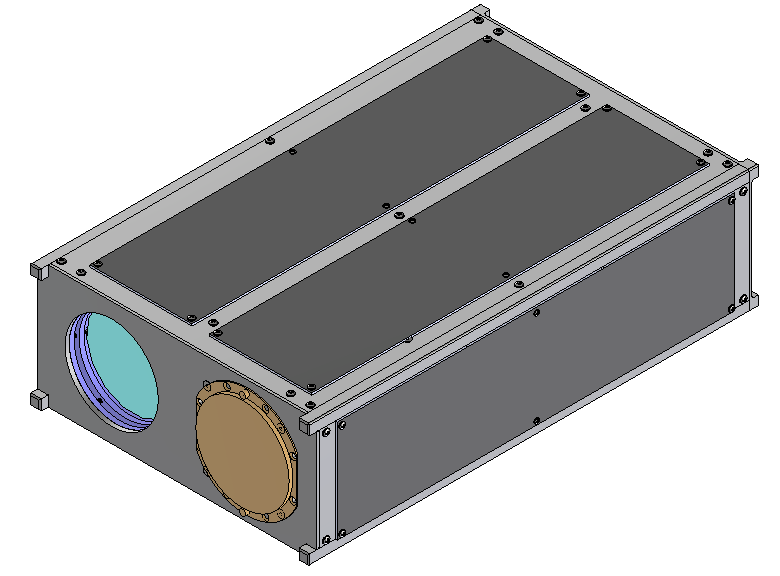
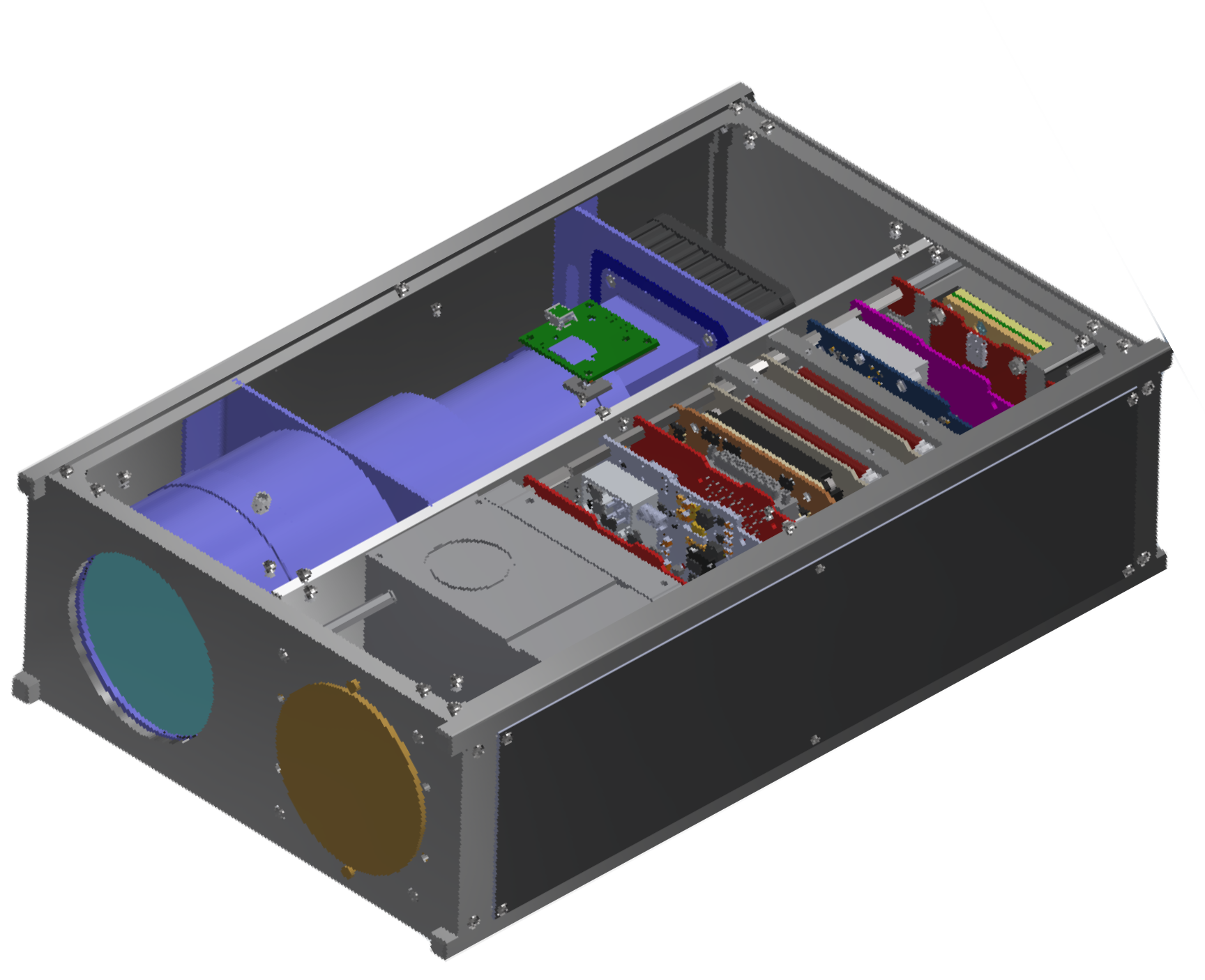
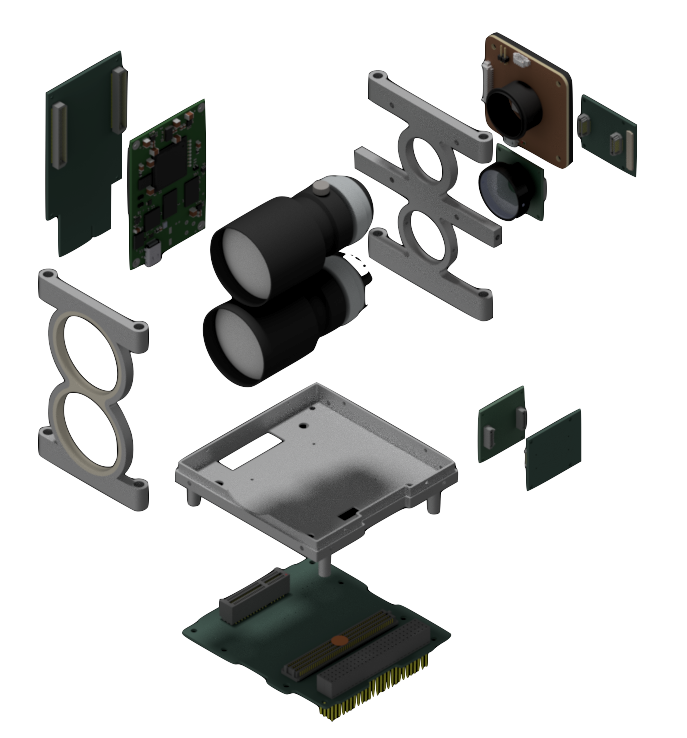
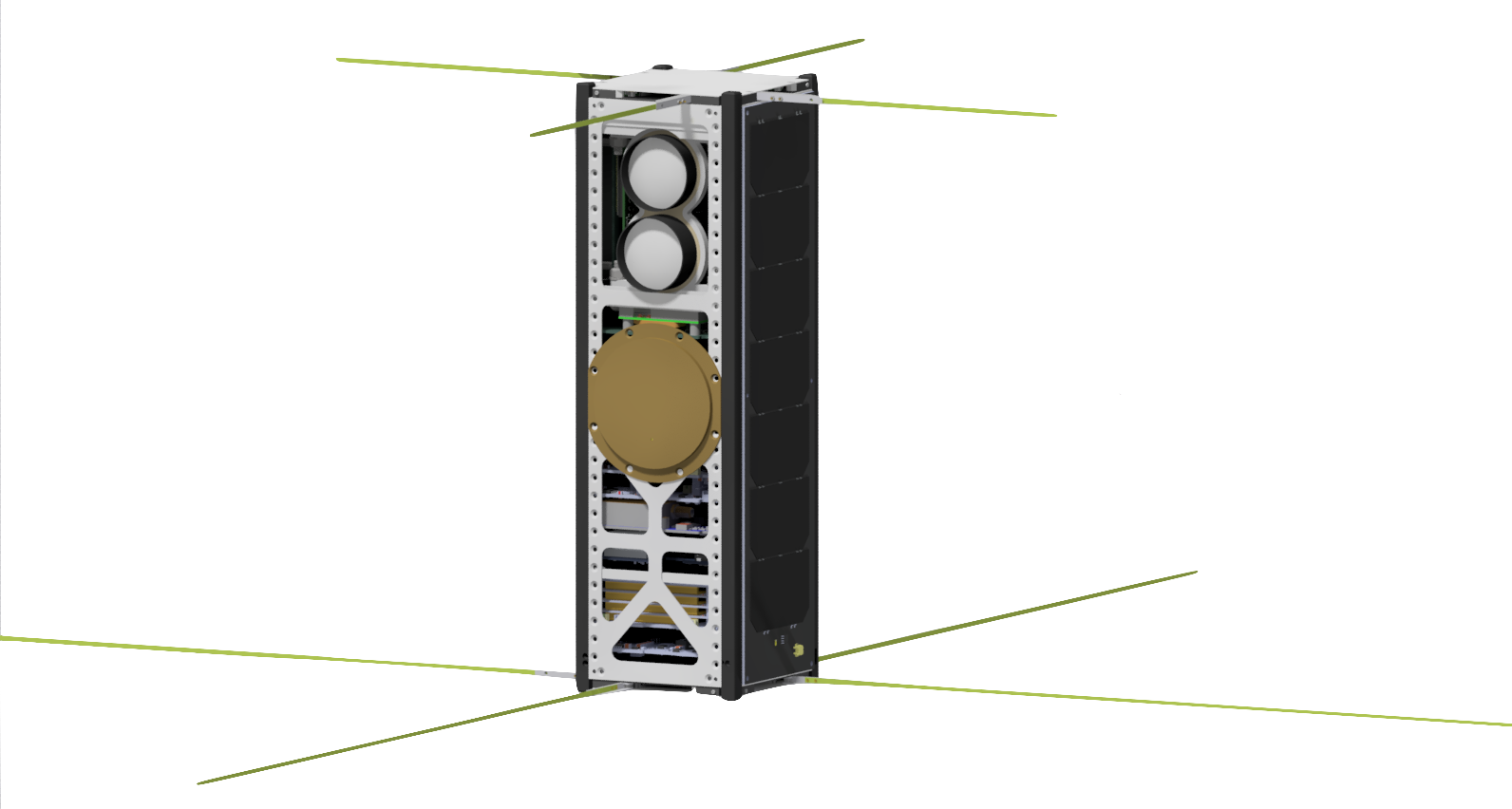
[left] The MOCI (Multiview Onboard Computational Imager) rendered. [right] The internals of the MOCI satellite, which include a 6.6 meter GSD (from 400km) optical system and a modified Nvidia TX2i GPU SoC.
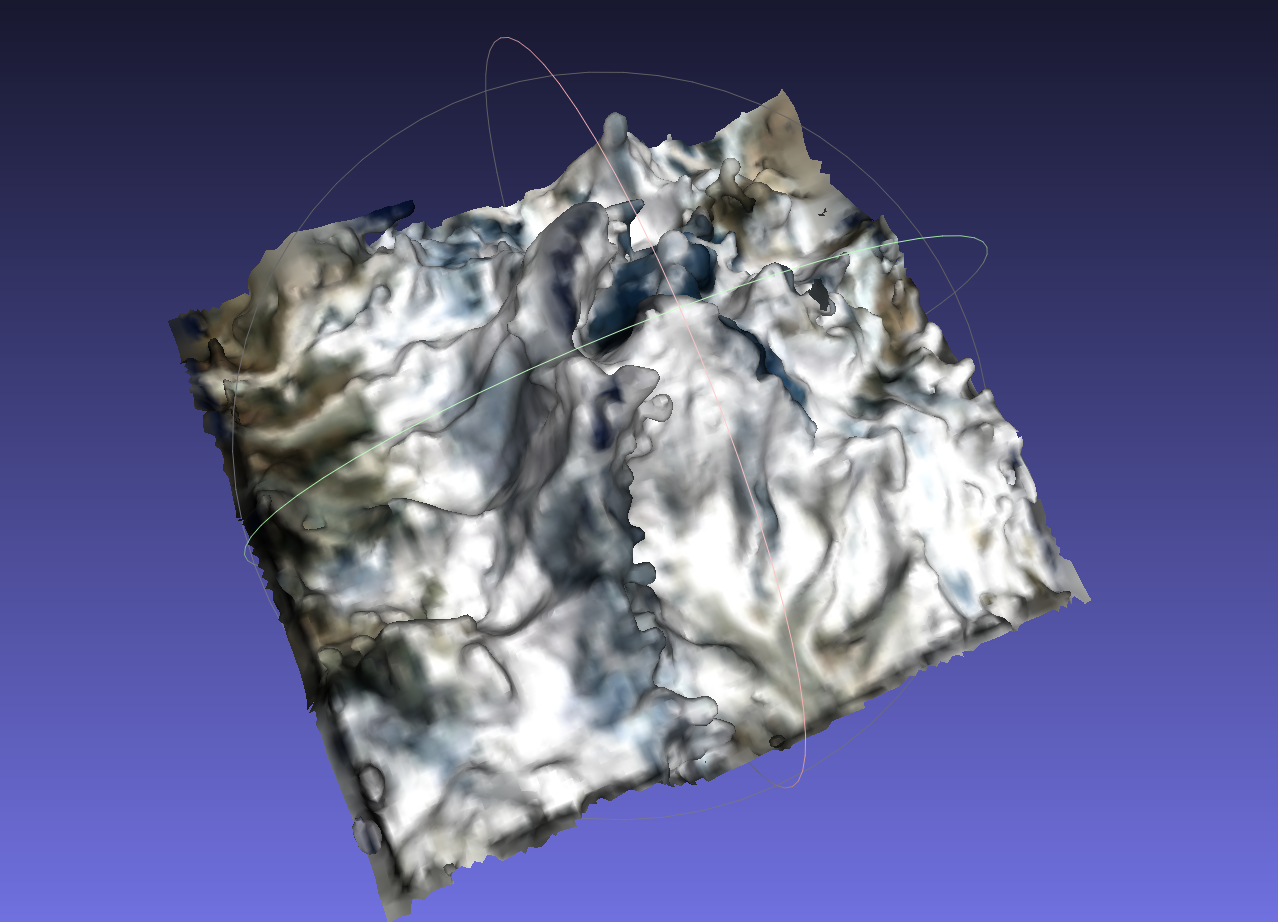
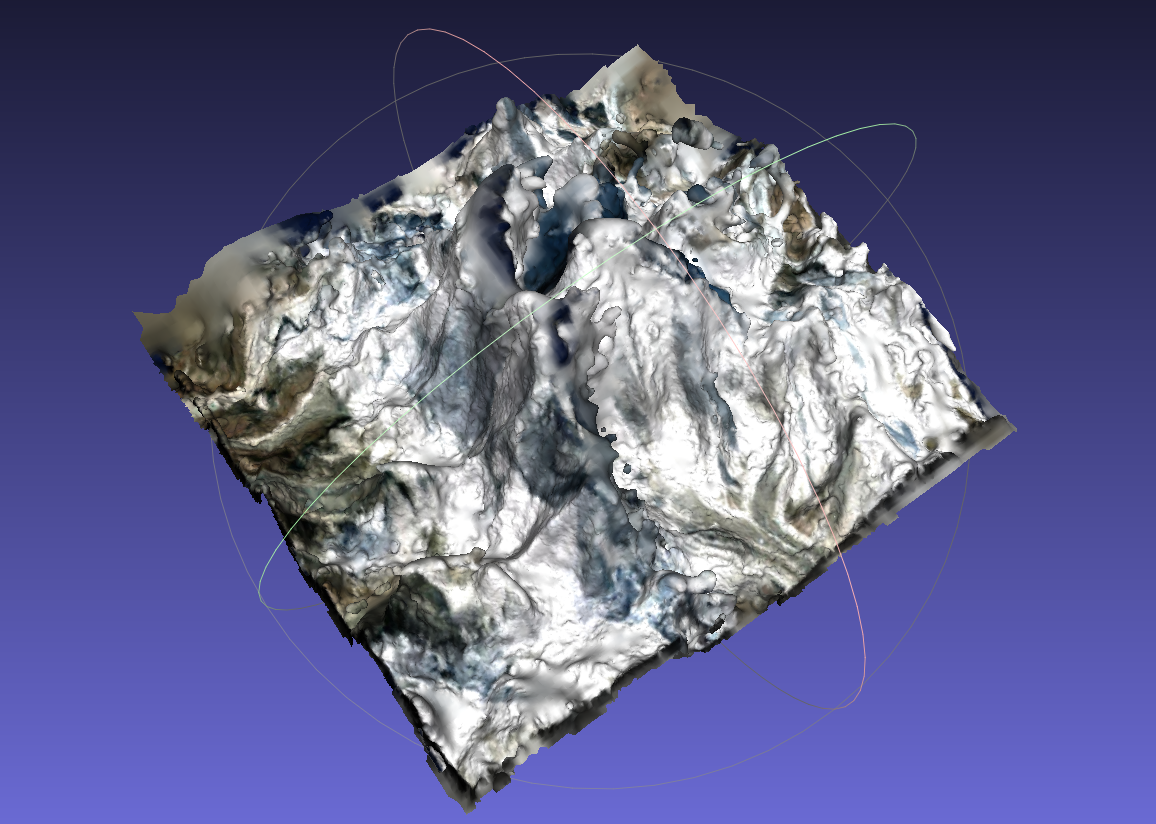
[left] A 3D reconstruction generated using SSRLCV with an average accuracy of ~47 meters to the ground truth. [right] A 3D reconstruction generated using VSFM with can average accuracy of ~142 meters to the ground truth.
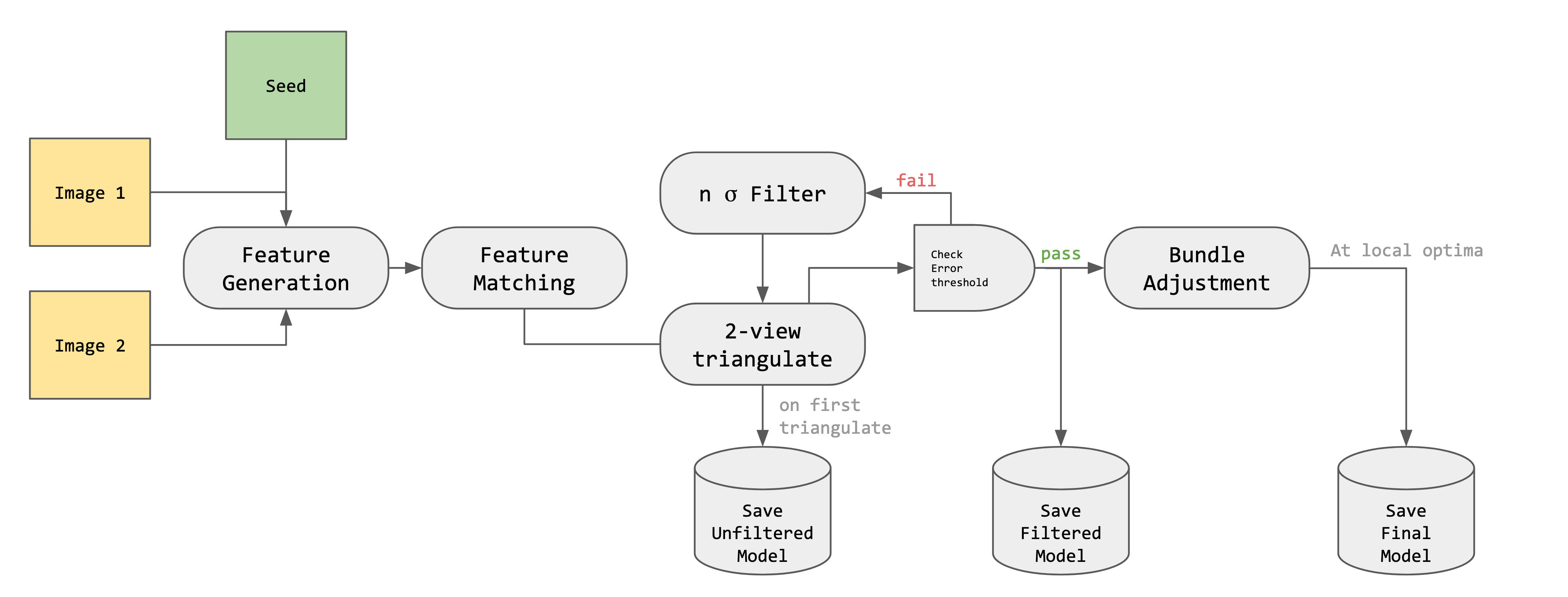
The recommended SSRLCV pipeline for the MOCI mission. Checkpointing should be possible at any stage or intermediate stage.
Bibtex Citation@inproceedings{AdamsCV2021,
year={2021},
month=mar,
publisher={IEEE},
author={Caleb Adams and Jackson Parker and David Cotten},
title={A Hardware Accelerated Computer Vision Library for 3D Reconstruction Onboard Small Satellites},
booktitle={2021 IEEE Aerospace Conference}
}
-
[r] The AIAA/Utah State Small Satellite Conference - SmallSat, Logan UT
-
-- 2020 --
-
[T] Master's Thesis (Final-Release), Athens GA
High Performance Computation with Small Satellites and Small Satellite Swarms for 3D Reconstruction
In this thesis research I discuss the design and implementation of 2 Earth observation Cube Satellites with a focus on the computational methods used and the design of their computer systems. The satellite computer systems are tested by simulating imaging of single view observations and multiview observations. Observations are simulated by imaging existing 3D models of the Earth's surface in 3D rendering software. A custom computer vision library, known as SSRLCV, is used to compute the final 3D models which are then compared to the ground truth. Restrictions, unique to the space environment, are mitigated with a specialized operating system, hardware, and software. Tests are run on the Nvidia TX2 and TX2i with timing, state, and power usage tracking. The Nvidia TX2i GPU accelerated SoC is modified for use in a Cube Satellite and is used as the platform for high performance onboard computation. The results show accurate 3D reconstruction of the surface of Earth feasible within 15 to 100 meters, depending on the camera system and altitude, while maintaining favorable power usage and computation time.
Caleb Adams, Committee: Dr. Ramviyas Parasuraman, Dr. David Cotten, Dr. Michael E. Cotterell, Dr. WenZhan Song
[left] The MOCI (Multiview Onboard Computational Imager) rendered. [right] The internals of the MOCI satellite, which include a 6.6 meter GSD (from 400km) optical system and a modified Nvidia TX2i GPU SoC.
[left] A 3D reconstruction generated using SSRLCV with an average accuracy of ~47 meters to the ground truth. [right] A 3D reconstruction generated using VSFM with can average accuracy of ~142 meters to the ground truth.
The recommended SSRLCV pipeline for the MOCI mission. Checkpointing should be possible at any stage or intermediate stage.
Bibtex Citation@mastersthesis{CalebAdamsMSThesis,
author={Caleb Ashmore Adams},
title={High Performance Computation with Small Satellites and Small Satellite Swarms for 3D Reconstruction},
school={The University of Georgia},
url={http://piepieninja.github.io/research-papers/thesis.pdf},
year=2020,
month=may
}
-
[T] Master's Thesis (Final-Release), Athens GA
-
-- 2019 --
-
[r] The AIAA/Utah State Small Satellite Conference - SmallSat, Logan UT
The Spectral Ocean Color Imager (SPOC) - An Adjustable Multispectral Imager A pre-launch overview of the SPOC satellite's science capabilities.
David L Cotten, Nicholas Neel, Deepak Mishra, Marguerite Madden, Caleb Adams, Susanne Ullrich, Adrian Burd, Malcolm Adams, Kaitlyn Summey, Casper Versteeg, Jackson Parker, Fred Beyette
Bibtex Citation@inproceedings{SPOCsatCotten2019,
title={The Spectral Ocean Color Imager (SPOC) - An Adjustable Multispectral Imager},
author={David L Cotten, Nicholas Neel, Deepak Mishra, Marguerite Madden, Caleb Adams, Susanne Ullrich, Adrian Burd, Malcolm Adams, Kaitlyn Summey, Casper Versteeg, Jackson Parker, Fred Beyette},
url={http://smallsat.uga.edu/images/documents/papers/david_smallsat_2019_paper.pdf},
journal={33nd Annual AIAA/USU Conference on Small Satellites},
year={2019},
publisher={AIAA}
}
-
[r] The IEEE Aerospace Conference, Big Sky MT
Towards an Integrated GPU Accelerated SoC as a Flight Computer for Small Satellites Integration of a Nvidia TX2i module onto a PC104+ compliant stack for small satellites, additional peripherals (such as the SmartFusion2 SoC) were added.
Caleb Adams, Allen Spain, Jackson Parker, Mattew Hevert, James Roach, David Cotten
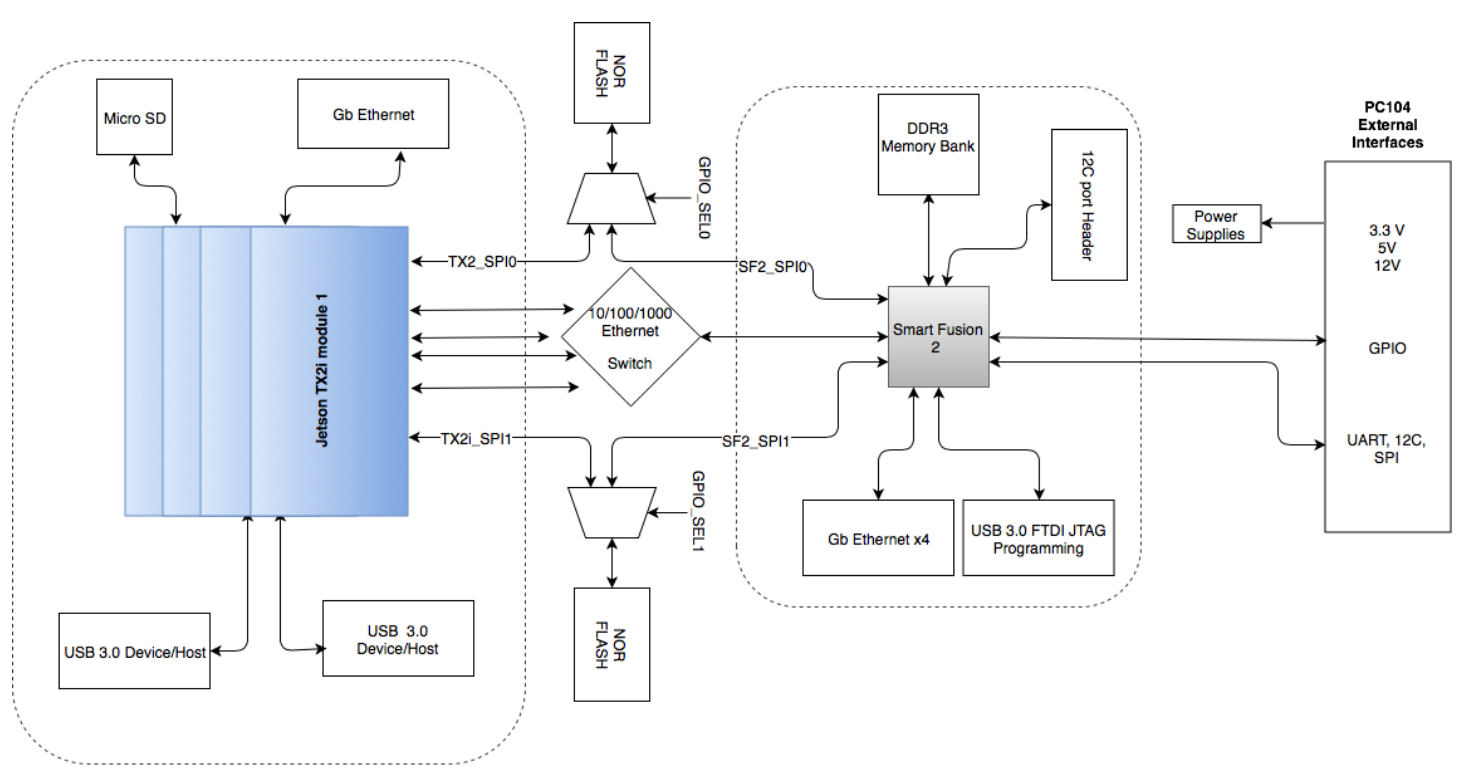
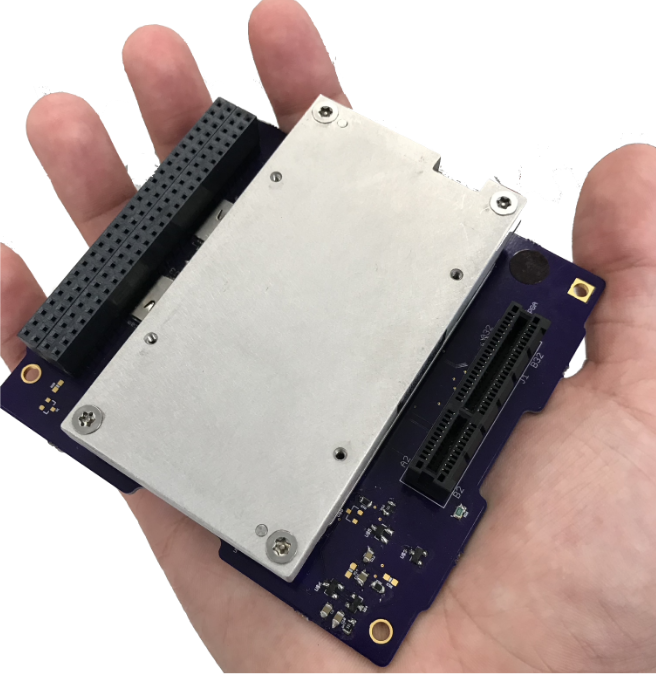
[left] A system overview of the Accelerated Flight Computed design. [right] the CORGI (Core GPU Interface) Board used for the (Multiview Oboard Computational Imager) MOCI satellite to connect the Nvidia TX2i GPU/SoC to the rest of the Cubesat Stack.
Bibtex Citation@inproceedings{TowardsGPUAdams2019,
doi={10.1109/aero.2019.8741765},
url={https://doi.org/10.1109/aero.2019.8741765},
year={2019},
month=mar,
publisher={IEEE},
author={Caleb Adams and Allen Spain and Jackson Parker and Matthew Hevert and James Roach and David Cotten},
title={Towards an Integrated GPU Accelerated SoC as a Flight Computer for Small Satellites},
booktitle={2019 IEEE Aerospace Conference}
} -
[s] The IEEE Aerospace Conference, Big Sky MT
Towards an Integrated GPU Accelerated SoC as a Flight Computer for Small Satellites The presentation of the previously noted paper.
Caleb Adams, Allen Spain, Jackson Parker, Mattew Hevert, James Roach, David Cotten
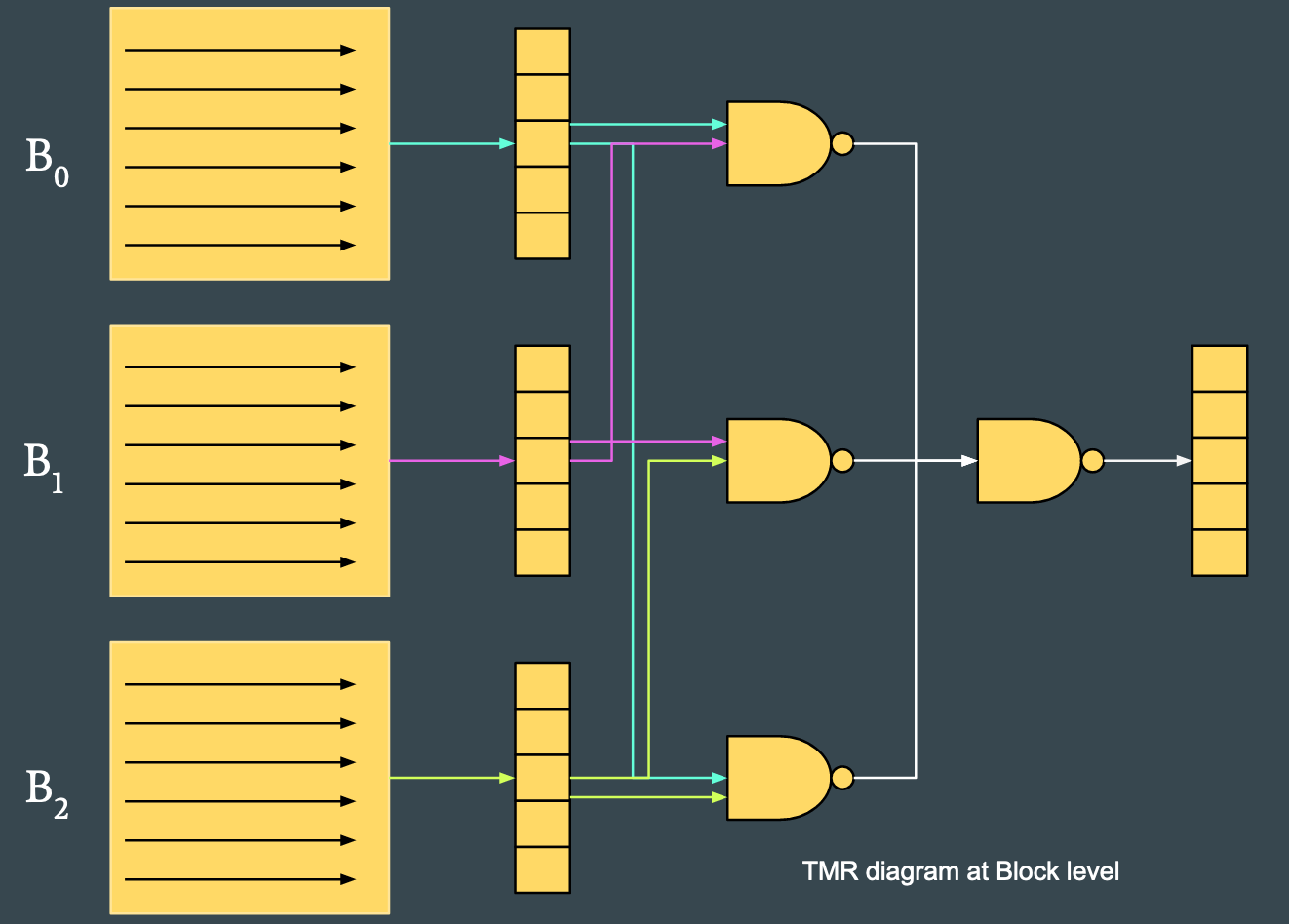
Simple example of PTX (the CUDA ISA) block level Triple Modular Redundancy (TMR).
-
[r] The AIAA/Utah State Small Satellite Conference - SmallSat, Logan UT
-
-- 2018 --
-
[s] Symposium on Space Innovation, Atlanta GA
Selected Software Demonstrations from the MOCI Satellite Mission Demonstrations of the reconstruction algorithms used on the Multiview Onboard Computational Imager Satellite.
Caleb Adams, Jackson Parker -
[p] Symposium on Space Innovation, Atlanta GA
GPU Accelerated SoCs as Flight Computers for Small Satellites General information, as a poster, about the SSRLs research on using GPU accelerated SoCs as flight computers.
Caleb Adams, Allen Spain, Jackson Parker, David Cotten -
[s] Invited Talk - UGA Physics and Astronomy Colloquium, Athens GA
What are Cubesats? A look at UGA Space Exploration. An overview of the UGA Small Satellite Research Lab spacecraft given to physics faculty and students.
Caleb Adams, Katie Summey, Nicholas Heavner -
[r] The AIAA/Utah State Small Satellite Conference - SmallSat, Logan UT
A Near Real Time Space Based Computer Vision System for Accurate Terrain Mapping A mathematical overview of the MOCI satellite's gpu accelerated computer vision system
Caleb Adams
Bibtex Citation@inproceedings{NearRealTimeAdams2018,
title={A Near Real Time Space Based Computer Vision System for Accurate Terrain Mapping},
author={Caleb Adams},
url={http://piepieninja.github.io/research-papers/adamssmallsat2018.pdf}, journal={32nd Annual AIAA/USU Conference on Small Satellites},
year={2018},
publisher={AIAA}
} - [$] AFRL UNP phase A winner, $700k phase B grant awarded for UGA's Multiview Onboard Computational Imager (MOCI), formerly the Mapping and Ocean Color Imager, Satellite
-
[s] Symposium on Space Innovation, Atlanta GA
-
-- 2017 --
-
[s] The AIAA/Utah State Small Satellite Conference - SmallSat, Logan UT
The Feasibility of Structure from Motion over Planetary Bodies with Small Satellites A report of the near finalization of computer simulations that allow for the MOCI satellite to simulate the SfM workflow.
Caleb Adams, Nicholas (Hollis) Neel, David Cotten
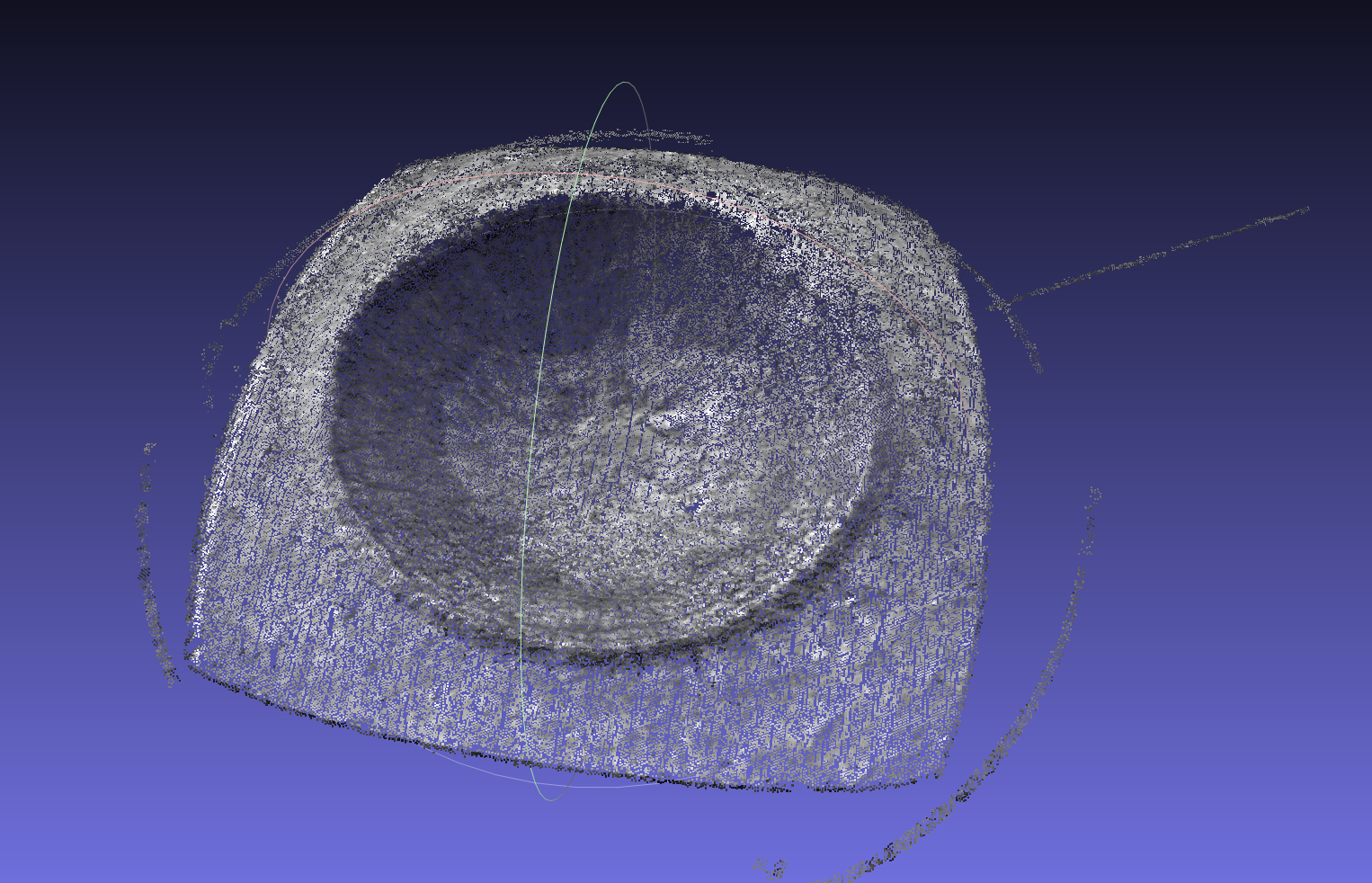
An example dense point cloud reconstruction of linne Crater on the moon. This was a pretty good reconstruction, simulated from a satellite orbiting ~150km above the lunar surface. The simulated optical payload was the same as MOCI's.
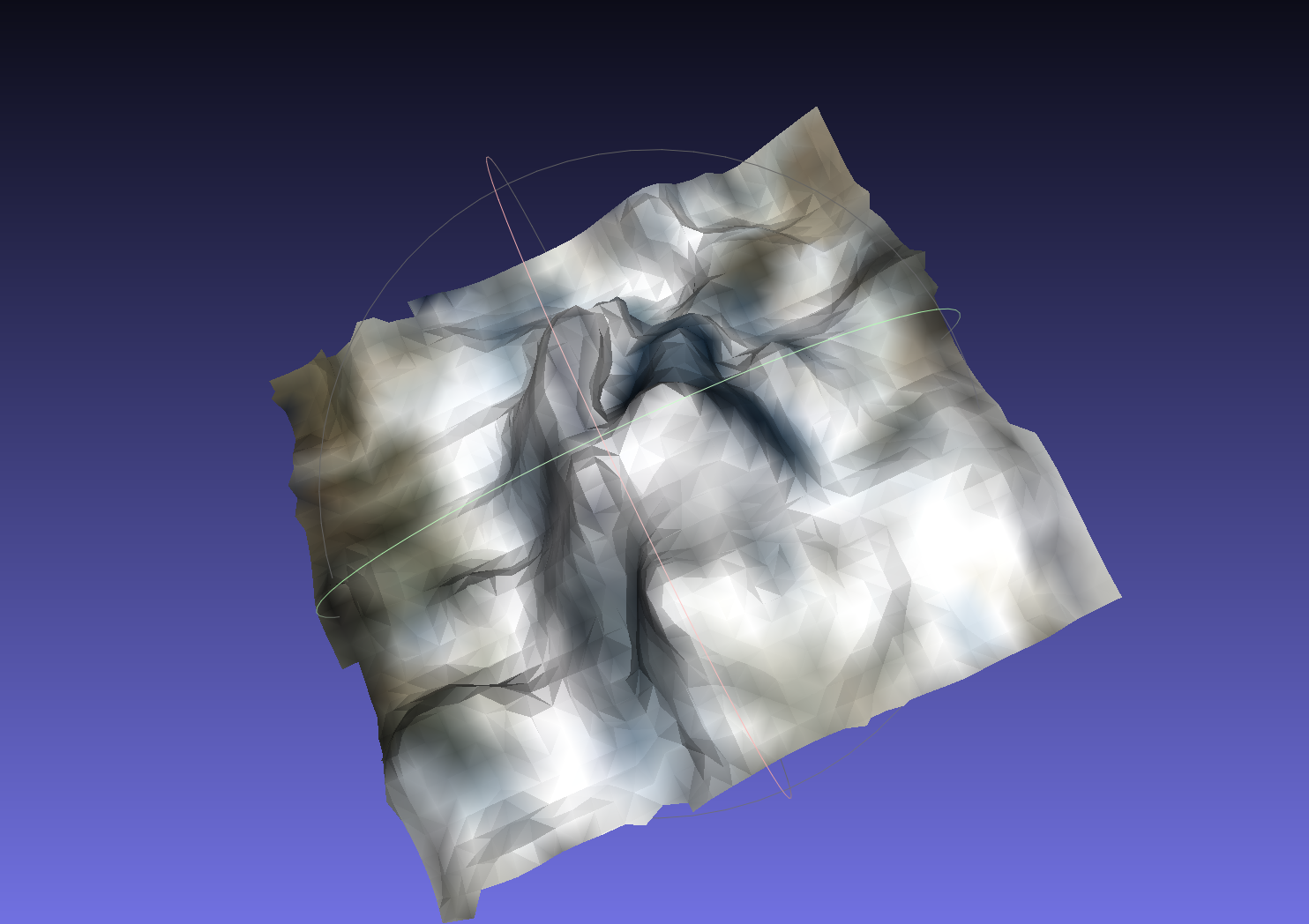
An example of a screened poisson surface reconstruction, with varrying octree depth, of mount everest. This was simulated with the MOCI payload, at ~400km. These are some of the expected resultes of the MOCI satellite.
An exploded view of the MOCI payload, as of August 2017. One of the payload cameras achieves ~18m GSD, the over (which is custom to the SSRL) achieves ~6.4m GSD at ~400km. -
[p] NASA/CASIS International Space Station Research and Development Conference, Washington D.C.
Structure from Motion from a Constrained Orbiting Platform Using ISS image data to generate cloud height models.
Caleb Adams, Nicholas (Hollis) Neel -
[s] Cubesat Developers Conference - Cal Poly, San Luis Obispo CA
(SP)ectral (O)cean (C)olor Satellite An initial description of the Hyperspectral capabilities of the SPOC satellite.
Caleb Adams, David Cotten, Deepak Mishra, Nicholas (Hollis) Neel, Graham Grable, Khoa Ngo
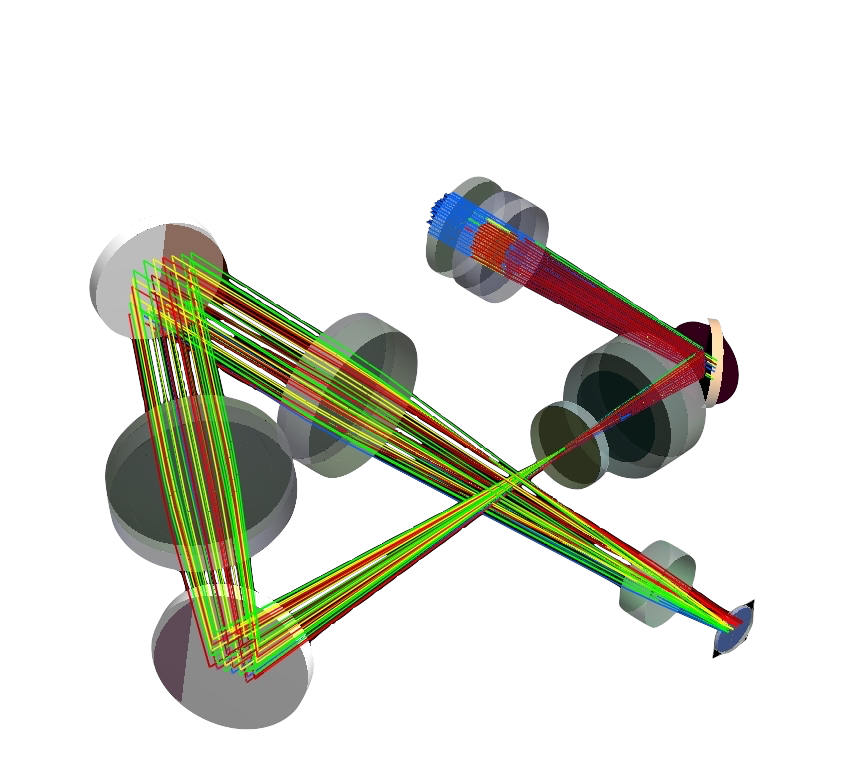
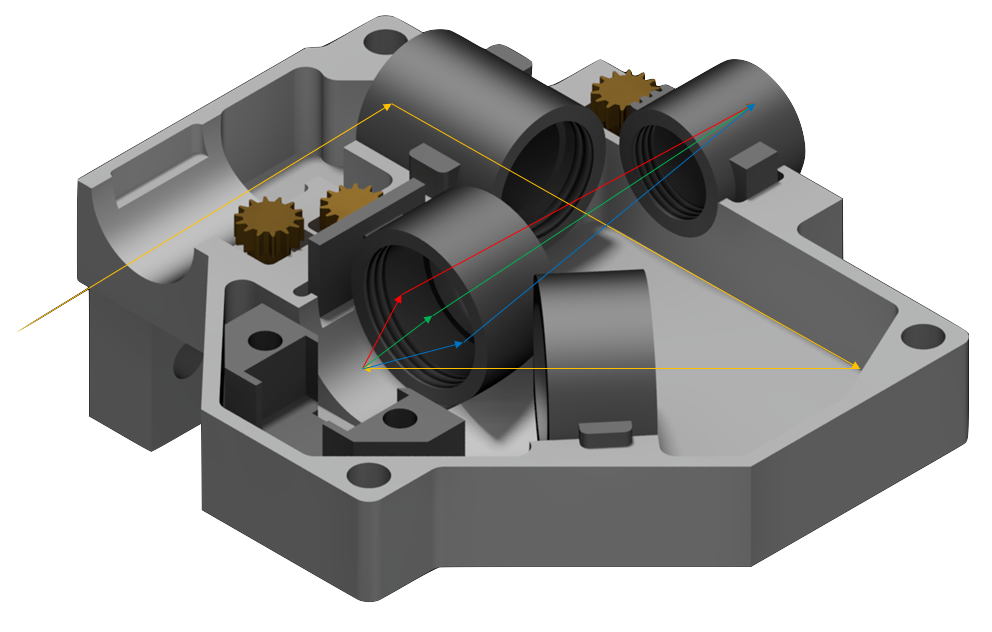
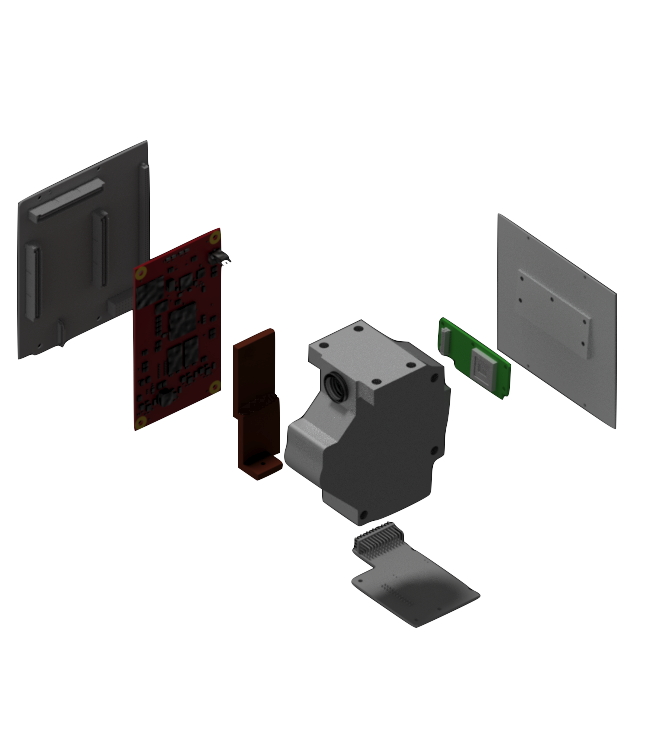
The SPOC optical train, lens housing, and exploded view of SPOCeye as it existed in the summer of 2017.
-
[p] UGA CURO Symposium, Athens GA
Accuracy of Dense Point Clouds Given Varying Image Quality An initial exploration of SfM from orbit using the MOCI satellite system.
Nirav Ilango, David Cotten, Caleb Adams, Nicholas (hollis) Neel, Marguerite Madden, Deepak Mishra -
[p] UGA CURO Symposium, Athens GA
The Feasibility of Structure from Motion over Planetary Bodies with Small Satellite System An initial exploration of SfM from orbit using the MOCI satellite system.
Caleb Adams -
[s] IGTF/ASPRS, Baltimore MD
STEM Opportunities for Undergraduates Building Nanosatellites: the NASA CubeSat Program Georgia An overview of the programmatic structure and opportunities at the UGA SSRL.
D. Cotten, C. Adams, D. Mishra, M. Madden, S. Bernardes, K. Ngo, N. Neel, N. Ilango, M. Le Corre, G. Grable, A. King -
[s] IGTF/ASPRS, Baltimore MD
Building a Small Satellite Research Program at the University of Georgia: UGA Payload Development for CubeSats A description of the UGA SSRL SPOC payload, with a focus on remote sensing applications.
D. Cotten, C. Adams, D. Mishra, M. Madden, S. Bernardes, K. Ngo, N. Neel, N. Ilango, M. Le Corre, G. Grable, A. King
-
[s] The AIAA/Utah State Small Satellite Conference - SmallSat, Logan UT
-
-- 2016 --
-
[p] AGU, San Francisco CA
The SPectral Ocean Color (SPOC) Small Satellite Mission: From Payload to Ground Station Development and Everything in Between An general overview of the SPOC satellite, pre-pdr and early phase A. David L. Cotten, Sergio Bernardes, Deepak Mishra, Caleb Adams, Hollis Neel, Khoa Ngo, Megan LeCorre, Paige Copenhaver, Nirav Ilango, Adam King, Graham Grable, Paul Hwang -
[p] AGU, San Francisco CA
Enhancing STEM Education through CubeSats: Using Satellite Integration as a Teaching Tool at a Non-Tech School An overview of the operations of the UGA SSRL. David L. Cotten, Sergio Bernardes, Deepak Mishra, Caleb Adams, Hollis Neel, Khoa Ngo, Megan LeCorre, Paige Copenhaver, Nirav Ilango, Adam King, Graham Grable, Paul Hwang -
[p] Georgia Scientific Computing Symposium, Athens GA
Feasibility of Structure from Motion over Planetary Bodies using Small Satellites A preliminary exploration of SfM from orbit using the MOCI satellite system.
Caleb Adams, David L. Cotten, Nicholas (Hollis) Neel, Kyle Hamilton, Jacob Conley, Deepak Mishra
-
[p] AGU, San Francisco CA
-
-- 2015 --
- [$] NASA USIP, $200k grant awarded for UGA's SPectral Ocean Color (SPOC) Satellite
- [$] AFRL UNP, $180k grant awarded for UGA's Mapping and Ocean Color Imager (MOCI) Satellite